|
Tianyu Tu I'm a Master's student at Stanford University, pursuing a degree in Mechanical Engineering with a focus on robot perception, tactile sensing, and AI for robotics. I'm currently working with Professor Mark Cutkosky at the Biomimetics & Dexterous Manipulation Laboratory (BDML) on whisker-inspired tactile sensing for underwater robotics. My research interests lie in enhancing robot perception through bio-inspired sensors, active vision, and learning-based methods. I focus on enabling robots to extract meaningful insights from limited sensory data and adapt to changing environments—much like how biological systems perceive and respond to their surroundings. I received my B.E. in Mechanical Engineering from Shanghai Jiao Tong University as part of the prestigious Tsien Hsue-Shen Honor Program. Born and raised in southern China, I maintain a balance between technical studies and artistic pursuits—I've been a tenor section leader in the university choir and continue to play piano and guitar. |
|
ResearchMy research focuses on robot perception—teaching robots to "see" and "understand" their environment using sensors like cameras and tactile arrays. I'm particularly interested in active vision systems that adjust to improve perception, bio-inspired sensors that mimic natural sensing mechanisms, and learning-based methods that enable robots to make quick, reliable decisions in dynamic environments. By ensuring robots can effectively interpret limited information, we empower them to adapt and respond with precision. |
Publications |

|
TacCap: A Wearable FBG-Based Tactile Sensor for Seamless Human-to-Robot Skill Transfer
Chengyi Xing*, Hao Li*, Yi-Lin Wei, Tian-Ao Ren, Tianyu Tu, Yuhao Lin, Elizabeth Schumann, Wei-Shi Zheng, Mark R. Cutkosky IEEE International Conference on Intelligent Robots and Systems (IROS), 2025 arXiv A wearable fiber Bragg grating (FBG) tactile sensor system that enables seamless skill transfer from human demonstrations to robotic manipulation through tactile-based learning. |
|
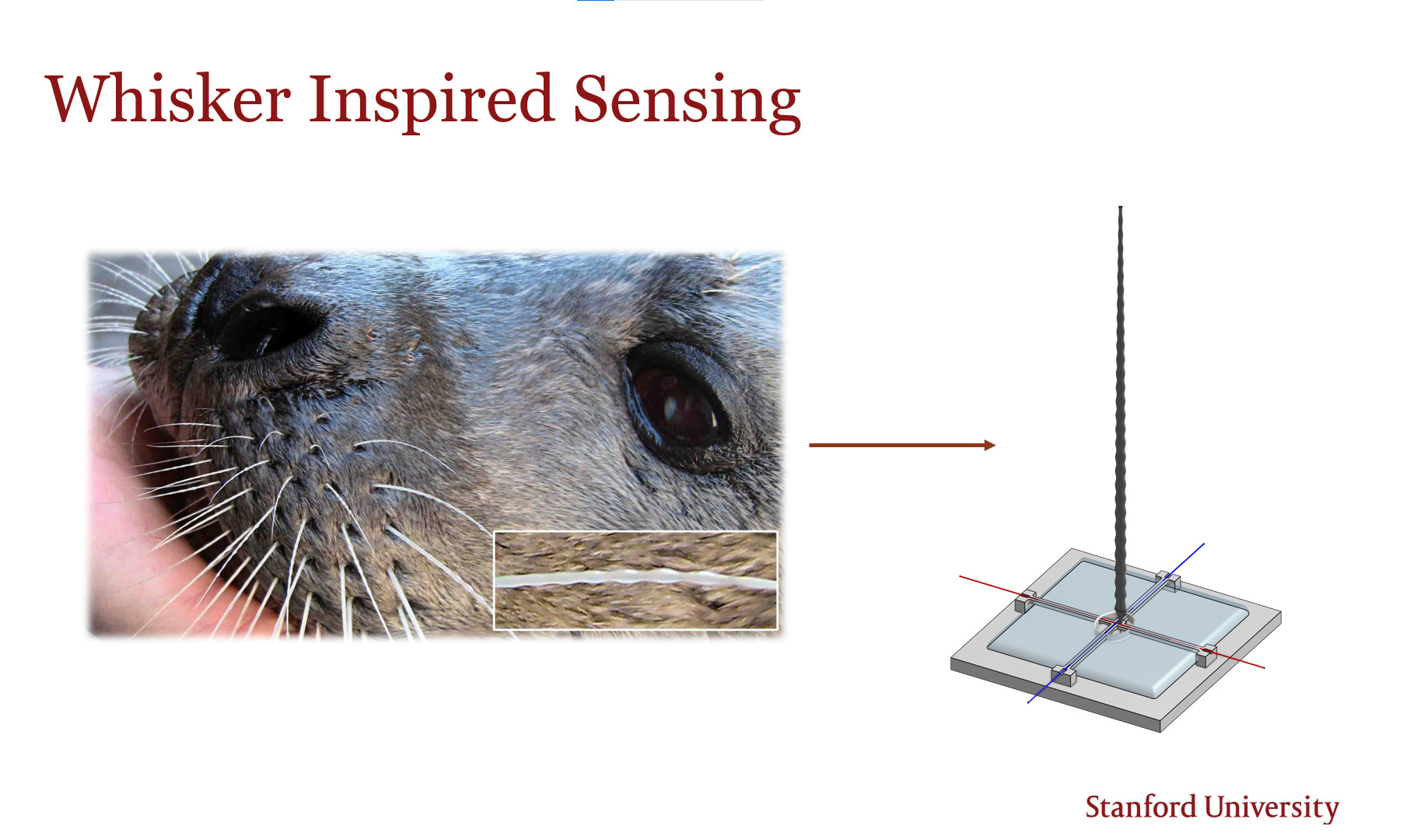
Fiber Bragg Grating Whisker Sensor for Passive Hydrodynamic Perception on Underwater Robots
Hao Li*, Tianyu Tu*, Ziyang Chang, Miaoya Zhong, Juhyun Jung, Clive Chung, Gianluca Iaccarino, Shuran Song, Mark R. Cutkosky In Progress A novel whisker-inspired tactile sensing modality using fiber Bragg grating optical strain sensors for underwater flow detection and hydrodynamic perception in aquatic robots. |
Research Projects |

|
Whisker-shaped Underwater Fiber-Bragg-Grating (FBG) Tactile Sensor
Stanford University, BDML, Dec 2024 - Present Advisor: Prof. Mark Cutkosky Developing a novel tactile sensing modality inspired by animal whiskers, integrating FBG optical strain sensors with compliant beams for underwater flow detection. Achieved >8× improvement in signal-to-noise ratio through experimental design and signal processing. Designed and built an embedded experimental platform with stepper-motor actuation and real-time data acquisition. |
|
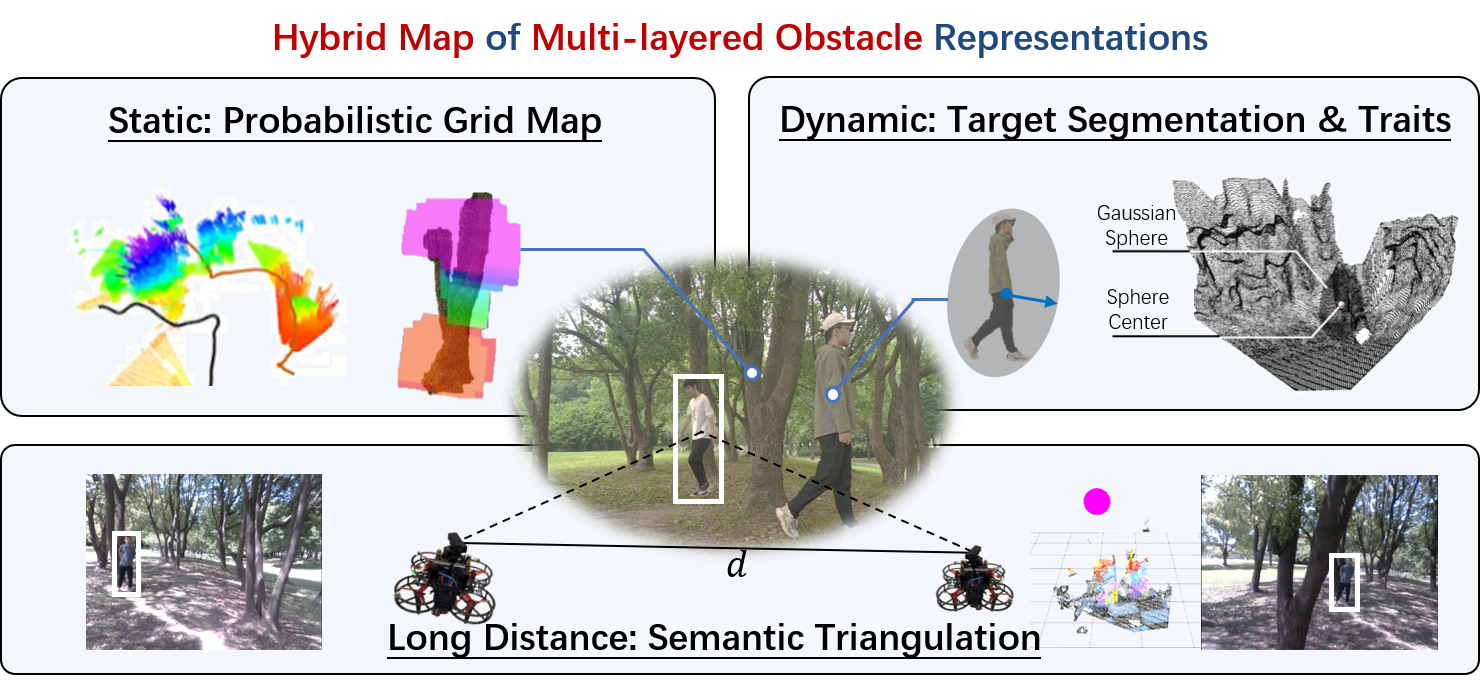
Large-range Mapping Technique Based on Active-vision System for Rotorcraft Robots
Shanghai Jiao Tong University, CIUS Lab, Dec 2023 - Jun 2024 Advisor: Prof. Wei Dong | B.E. Graduation Project Developed a robust large-range real-time mapping technique for rotorcraft robots using probability grid mapping, YOLOv5, and DBSCAN clustering to represent obstacles. Introduced a multi-agent collaborative triangulation method for distant obstacle mapping. The system automatically adapted to RGB-D camera parameters during dynamic flight and was validated through simulations and real-world flight tests. |
|
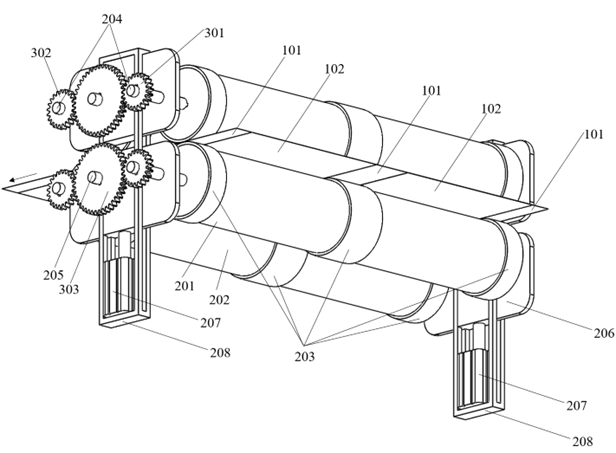
Corrugation Removal in Calendering of Lithium-Ion Battery Electrode Sheets
Shanghai Jiao Tong University, Institute of Thin Plate Structure Manufacturing, Sep 2022 - Sep 2023 Advisors: Prof. Linfa Peng, Prof. Zhutian Xu Analyzed calendering force effects on electrode sheets via Abaqus simulations and literature review. Developed three innovative corrugation mitigation methods inspired by belt gearing and hydraulics. Designed a novel multi-stage calendering apparatus with differential roller diameters for precise velocity control—now patent-pending. |
Course Projects |
|
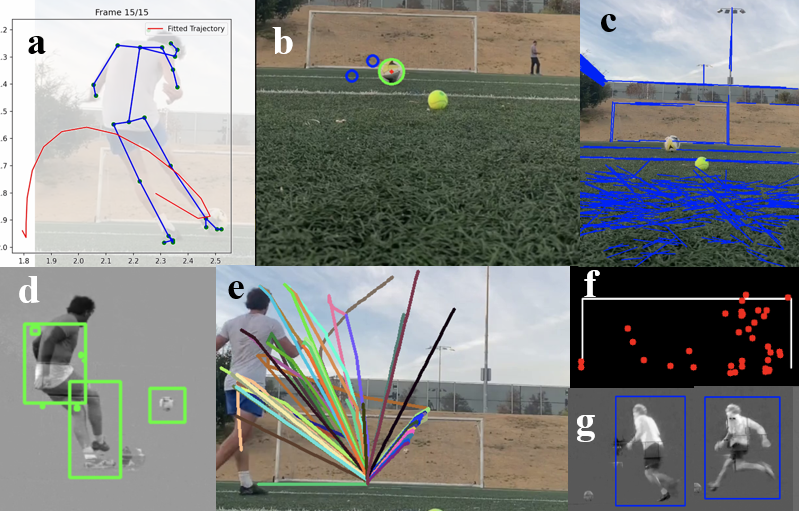
Video-Driven Automated Predictions of Soccer Shots via Machine Learning
CS229: Machine Learning, Stanford University, Fall 2024 Preprocessed athlete motion data with traditional computer vision algorithms (Hough transform, polynomial fitting) to extract interpretable features from raw video. Combined visual features with audio spectrogram filtering to identify key frames. Achieved >20% accuracy improvement in shot direction prediction by incorporating spline-fitted foot trajectories as logistic regression model inputs. |
|
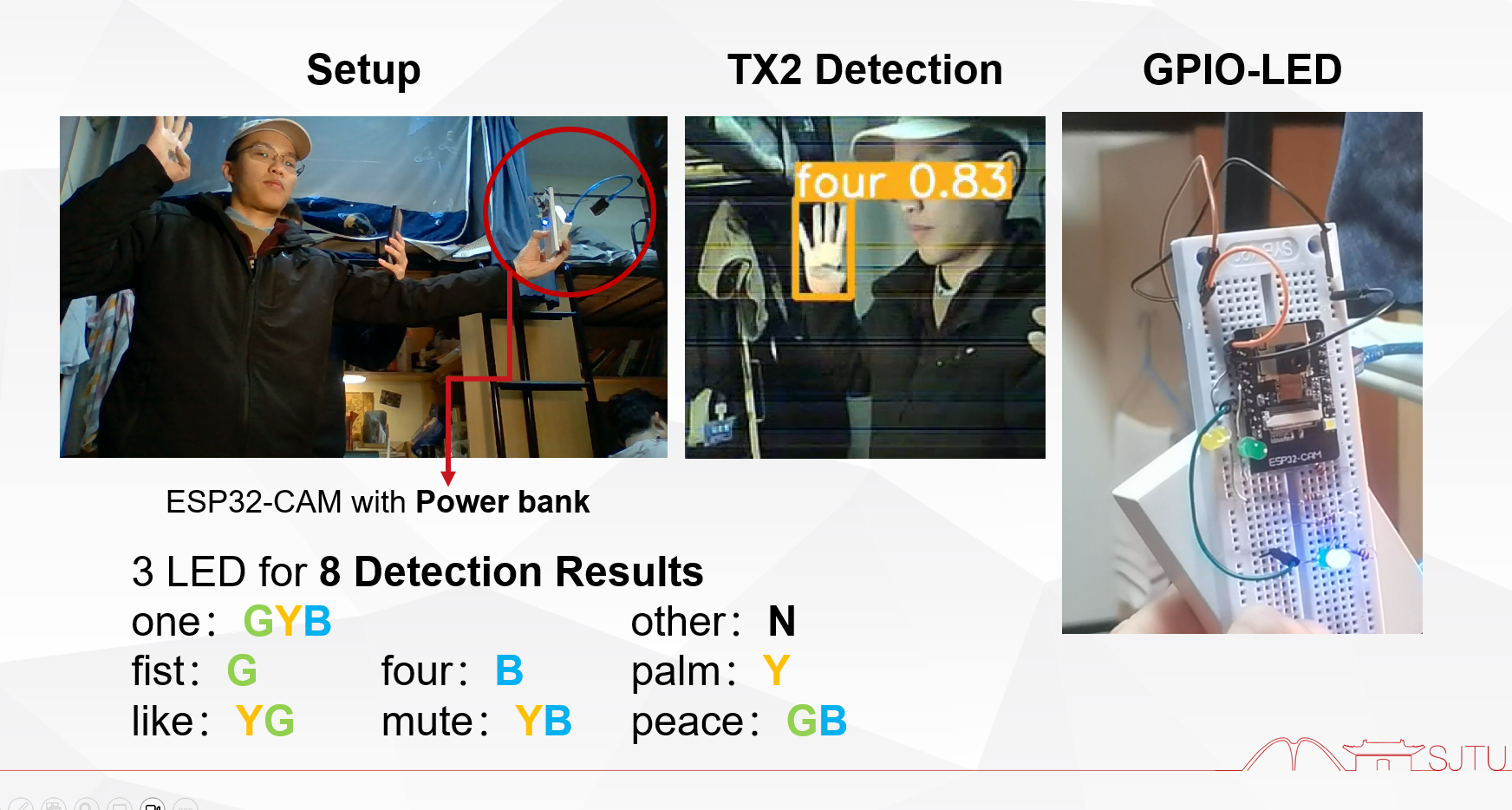
Gesture Visual Perception and Image Transmission System
Embedded System Design, Shanghai Jiao Tong University, Fall 2023 Implemented an end-to-end embedded architecture using ESP32-CAM for real-time data capture, UDP protocol for low-latency transmission, and NVIDIA TX2 for model inference. Trained and deployed a YOLOv5 gesture-recognition model, bridging perception algorithms with embedded hardware systems. |
|
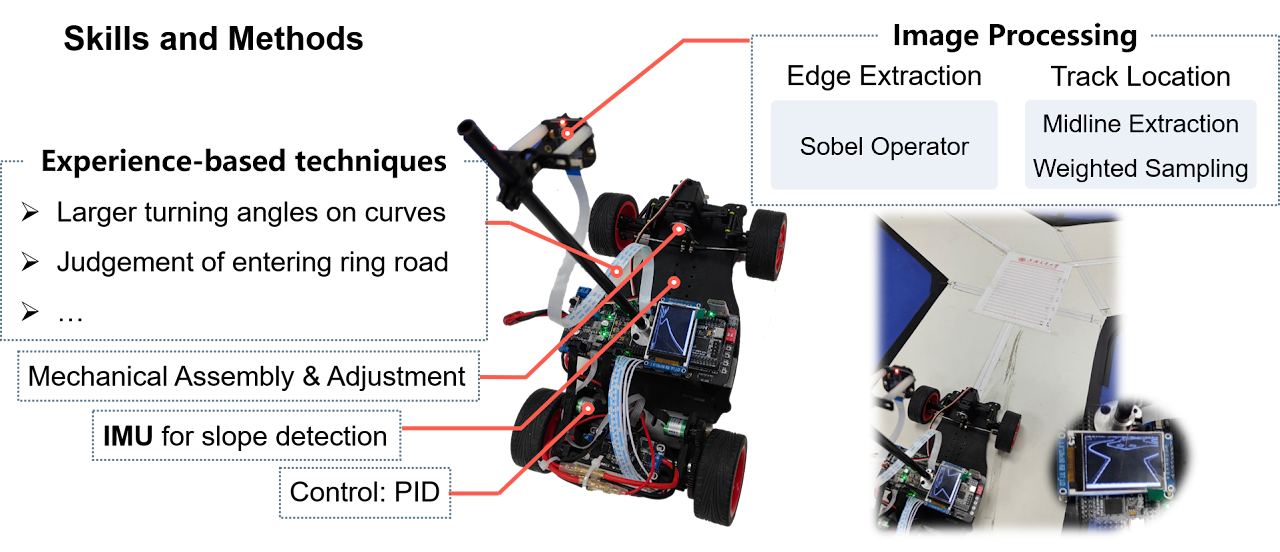
Vision-guided Smart Car for Campus Competition
18th China College Student Smart Car Competition - Camera Group, 2022-2023 Designed a vision pipeline using Sobel-based lane boundary detection and non-uniform centerline sampling to compute lateral offset. Integrated perception with PD steering control and speed regulation, with fallback bang-bang control for steep slopes. Secured 3rd place in campus camera group (8 teams). |
|
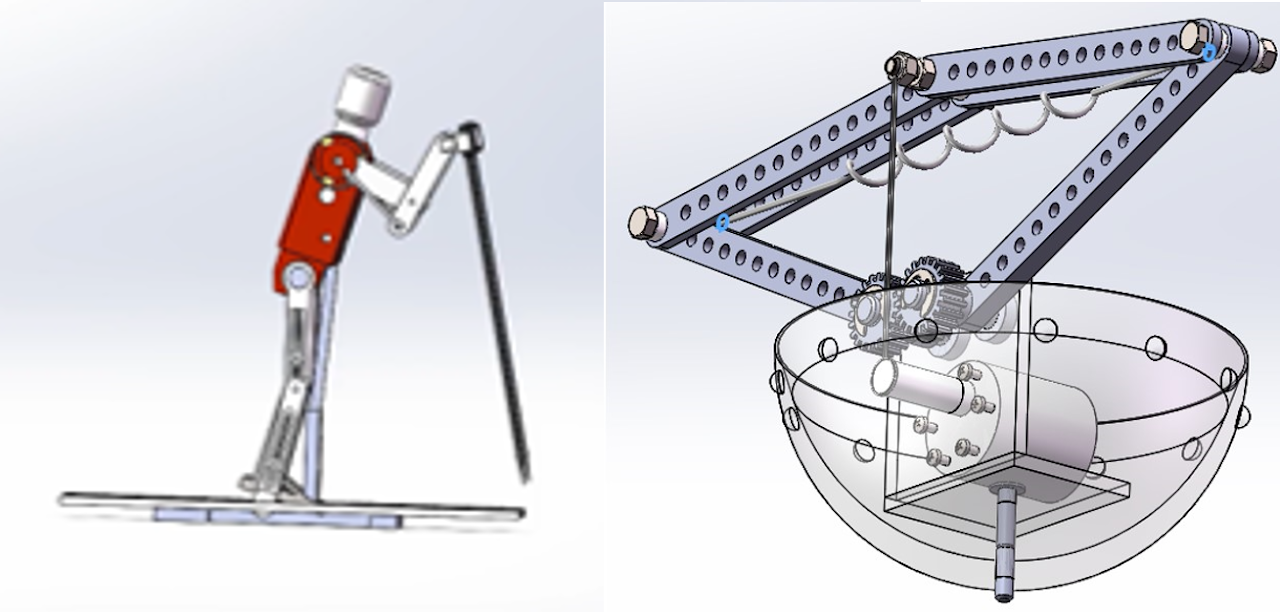
Mechanical Design for Ski-Teaching and Jumping Robots
Design and Manufacture, Shanghai Jiao Tong University, 2022-2023
Ski-Teaching Robot: Conducted motion analysis to design a robot mimicking skiing techniques. Engineered a mechanism with linkages and planetary gears for accurate arm movement replication.
|
Teaching & Service |
Grader, ENGR 108: Introduction to Matrix Methods Stanford University, Fall 2025 Prof. Stephen Boyd, Department of Electrical Engineering Academic Peer Tutor Shanghai Jiao Tong University, Fall 2021 Provided weekly tutoring (2+ hours) in University Physics, Mathematical Physics Equations, and Theoretical Mechanics. Recognized with an "Outstanding Peer Tutor" award. Tenor Section Leader, SJTU Student Choir Shanghai Jiao Tong University, 2021-2024 Organized rehearsals and guided fellow tenors in mastering vocal techniques, balancing leadership with musical passion. |
Honors & Awards |
Shanghai Scholarship (Top 2%, 2023) Zhiyuan Honors Scholarship (Top 10%, awarded annually 2021-2023) Meritorious Winner, Mathematical Contest in Modeling (Top 10% worldwide, 2022) |
|
Website template from Jon Barron. Last updated: October 2025. |